
Budowa silników krokowych
Silniki krokowe są najczęściej wykorzystywane w rozmaitych urządzeniach, zarówno w automatach przemysłowych jak również w rozwiązaniach hobbystycznych lub modelarskich. Silniki krokowe to wdzięczne oraz przyjemne urządzenia, a łatwość ich pozycjonowania oraz sterowanie jest naprawdę proste, o czym postaram się przekonać czytelników w dalszej części tego artykułu opisującym budowę i zasadę działania silnika.
Silnik krokowy, zwany też skokowym lub impulsowym, jest to rodzaj silnika elektrycznego zasilany impulsowo, który przekształca impulsy elektryczne na ruchy mechaniczne. Przykładowo silnik otrzyma jeden impuls elektryczny, wtedy wykona jeden skok o niewielki kąt, inaczej mówiąc wykona jeden krok. Ilość tych impulsów decyduje o położeniu wirnika (rotora), czyli jeżeli silnik posiada 200 kroków na obrót i podamy 50 impulsów wykona ¼ obrotu, natomiast szybkość ich podawania (częstotliwość) decyduje o prędkości silnika. Kierunek obrotu silnika zależy od sekwencji impulsów zasilających uzwojenia, mówiąc prościej w jaki sposób podamy kierunek przepływu prądu (polaryzacje zasilania cewek silnika) przez cewkę silnika w przypadku silników z magnesami stałymi. Mniej więcej tak wygląda sterowanie silnika i zasada działania silnika krokowego.
Sprawdź cenę silników krokowych w sklepie EBMIA.pl

Prędkość obrotowa silników krokowych nie jest imponująca- rzędu kilku, kilkunastu obrotów na sekundę. Należy również pamiętać, że wraz ze wzrostem prędkości silnika spada jego moc- moment trzymający (Nm), czyli im mniejsze obroty tym większą siłę posiada silnik. Przy dużych prędkościach silnik szybko traci swą moc, wynika to ze sterowania, a dokładniej z prędkości podawania impulsów na cewkę silnika. Można powiedzieć, że silnik przy dużych częstotliwościach ,,zadusi się”, dają też znać o sobie rezonanse mechaniczne i elektryczne, ale o tym w następnym artykule „Sposoby sterowania silników krokowych”. Diagram poniżej przedstawia charakterystykę pracy silnika krokowego FL57STH56-2804A czteroprzewodowego o momencie trzymającym 1,2 Nm.
Charakterystyki pracy silnika krokowego
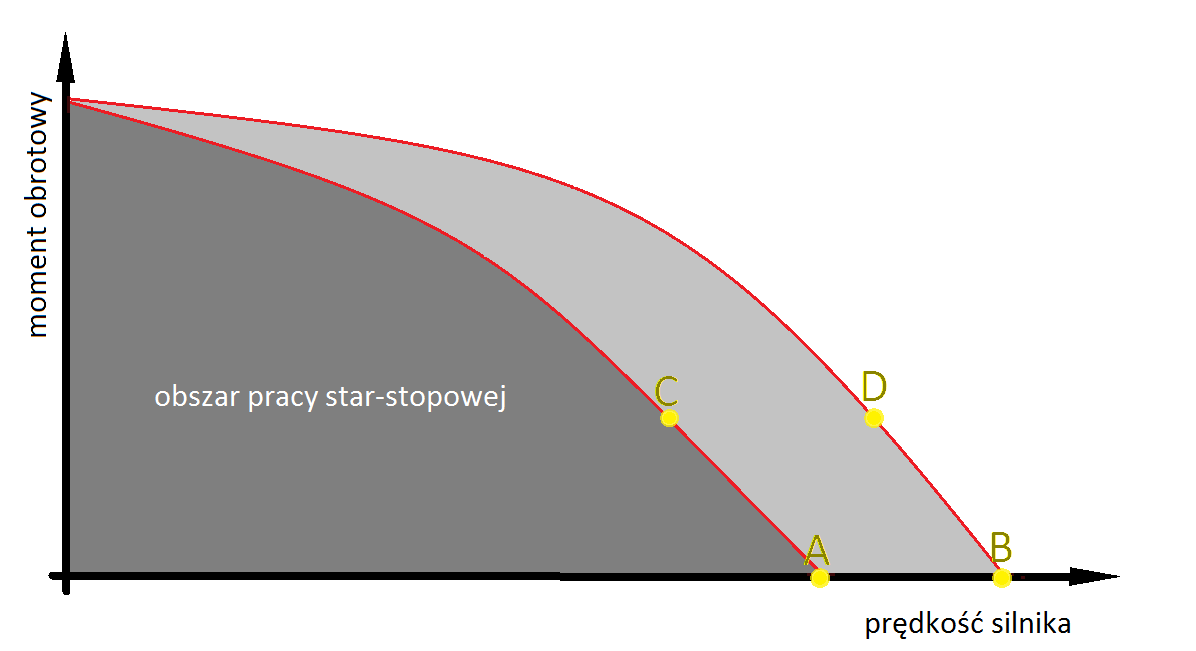
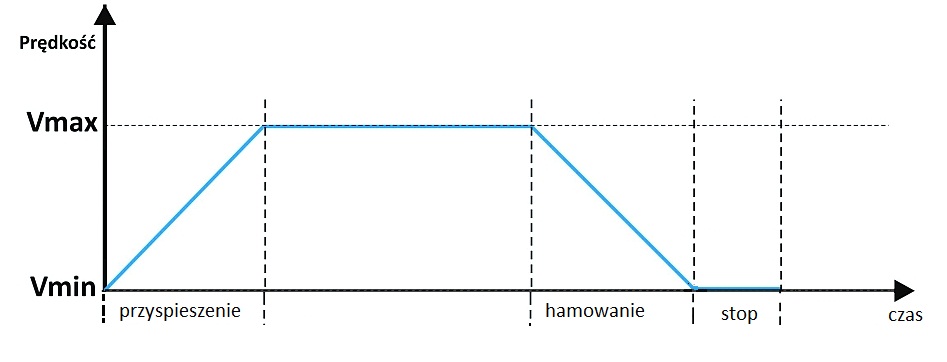
Pokrótce postaram się przeanalizować charakterystykę takiego silnika dla zobrazowania tej zależności. Diagramy poniżej przedstawiają uproszczoną charakterystykę silnika. Oś pozioma przedstawia częstotliwość impulsów sterujących, natomiast oś pionowa moment obrotowy (Nm), który określa siłę silnika. Punkt A określa maksymalną częstotliwość rozruchu. Przy większej częstotliwości silnik w ogóle nie ruszy. Natomiast jeżeli silnik wystartuje z punktu A można go rozpędzić nawet do punktu B na wykresie, który wyznacza maksymalną prędkość silnika. Praca silnika w praktyce w zakresie punktów A i B jest nie realna, ponieważ te punkty odnoszą się do silnika nieobciążonego. Jego siła przy tak dużych częstotliwościach jest prawie zerowa i wystarczy do napędzenia tylko samego rotora. Jeżeli silnik ma pracować z przyłożonym obciążeniem trzeba jego start zacząć od mniejszych prędkości, częstotliwości. Pokazuje to przykładowy punkt C. Jeżeli silnik wystartuje można jego prędkość zwiększyć do np. punktu D. Wynika z powyższego wniosek- jedynie przy prędkościach oraz obciążeniu wyznaczonym przez ciemno szare pole silnik będzie pracował synchronicznie w tak zwanym trybie start-stopowym bez zachowania rampy oraz zmiany kierunku i nie zgubi ani jednego impulsu(kroku). Natomiast jeżeli silnik będzie wymagał szybkiej zmiany kierunku prędkości jeszcze się zmniejszą. Zaznaczony obszar charakterystyki kolorem jasno szarym, pokazuje prace silnika jeśli zostanie zastosowany inteligentny sposób sterowania, tzn. zostanie zachowana tzw. rampa przyspieszenia oraz hamowania, czyli stopniowe przyspieszanie oraz hamowanie silnika. Można w ten sposób zwiększyć możliwości silnika.
Uproszczona charakterystyka:
Rampa przyspieszenia oraz wyhamowania silnika krokowego.
Wspomniane wcześniej rezonanse mechaniczne również mają wpływ na pracę silnika. Przy sterowaniu pełno krokowym, przy pewnej prędkości silnik w ogóle nie będzie pracował. Dokładnej charakterystyki nie sposób podać, ze względu na to, że przyłożone obciążenie do silnika ma w znacznym stopniu wpływ na rezonanse mechaniczne silnika, co prezentuje wykres poniżej. Można ten problem zniwelować lub w prawidłowo zaprojektowanym systemie wyeliminować, stosując sterowanie półkrokowe tym bardziej mikrokrokowe lub zmniejszając częstotliwości robocze, co wyeliminuje wpadnięcie silnika w taki obszar.

Wady i zalety silnika krokowego
Należało by wymienić też inne wady silników krokowych oprócz wyżej wymienionych:
- małe prędkości pracy
- stosunkowo duży pobór prądu
- duża emisja ciepła
- w przypadku zbyt dużego obciążenia – tzw. gubienie kroków, co opisuje między innymi wyżej wspomniana charakterystyka silnika krokowego.
Ostatnia wymieniona wada ogranicza niestety stosowanie silników krokowych w przypadku dużych i nie dających się przewidzieć zmian momentów obciążających.
Sprawdź cenę silników krokowych w sklepie EBMIA.pl
Oprócz wad silniki krokowe posiadają szereg zalet:
- Bardzo wysoka dokładność pozycjonowania, znakomicie sprawdzają się tam gdzie potrzebny jest kontrolowany ruch.
- Łatwość sterowania ilość (impulsów decyduje o położeniu wału, częstotliwość decyduje o prędkości silnika krokowego).
- Wysoki moment obrotowy
- również zaletą silników krokowych jest możliwość pracy z małymi prędkościami, przy których zachowują swój moment (siłę). Nie trzeba stosować drogich serwomechanizmów z przekładniami,(które to redukują prędkość, a podnoszą moc) do pozycjonowania maszyny. Dość duża moc silników krokowych pozwala na bezpośrednie podłączenie silnika do maszyny, eliminując stosunkowo drogą przekładnię.
- Dużą zaletą jest praca silnika krokowego w otwartej pętli sprzężenia zwrotnego. Nie potrzebuje on drogiego en kodera, który to informuje sterownik np. serwomechanizmu o pozycji wału (rotora). Pozycję silnika krokowego wyznacza liczba podanych impulsów.
- Brak elementów gdzie występuje tarcie. Silniki krokowe nie posiadają szczotek, komutatora ani innych elementów, które się zużywają w wyniku tarcia. Żywotność silników krokowych jest dość duża i wyznaczona jest raczej przez zastosowane łożyska.
Z powyższych zalet silniki krokowe znalazły zastosowanie w dziedzinach, w których istotna jest możliwość precyzyjnego pozycjonowania ruchem, takich jak:
- Automatyka (frezarki cnc, plotery plazmowe, cięcie laserem, maszyny grawerujące, tokarki, maszyny dozujące, urządzenia medyczne, markery)
- Robotyka (sterowanie manipulatorami)
- Czytniki DVD/CD (pozycjonowanie głowicy)
- Drukarki (sterowanie ruchem głowicy drukującej, przesuw papieru)
Podział silników krokowych
Istnieje dość dużo odmian silników krokowych, co prezentuje poniższy diagram.

Ogólny podział silników krokowych dzieli je na wirujące i liniowe. Wśród bardziej rozpowszechnionych silników wirujących możemy wyróżnić silniki: o zmiennej reluktancji, o magnesach trwałych i hybrydowe. Aby łatwiej zrozumieć zasadę działania silnika skupimy się właśnie na tych trzech typach.
Silniki reluktancyjne trzyuzwojeniowe nie mają dobrych parametrów i zostały wyparte z przemysłu przez inne rodzaje silników. Przedstawimy jego raczej w celach poznawczych do zrozumienia zasady pracy silnika. Natomiast silniki krokowe z magnesem stałym pod pewnymi względami są lepsze od silników reluktacyjnych i bywają stosowane do dziś. Natomiast najbardziej wydajne o najlepszej charakterystyce oraz najczęściej stosowane są silniki hybrydowe, które to łączą obydwie technologie silników reluktacyjnych oraz z magnesami stałymi.
Różnorodność rynkowa silników krokowych jest bardzo duża, o czym świadczy oferta jednego z dystrybutorów silników krokowych sklepu www.ebmia.pl. Zdjęcie poniżej prezentuje silnik krokowy z czterema wyprowadzeniami FL57STH56-2804A, którego wcześniej charakterystykę analizowaliśmy.

Wyprowadzenia silnika krokowego
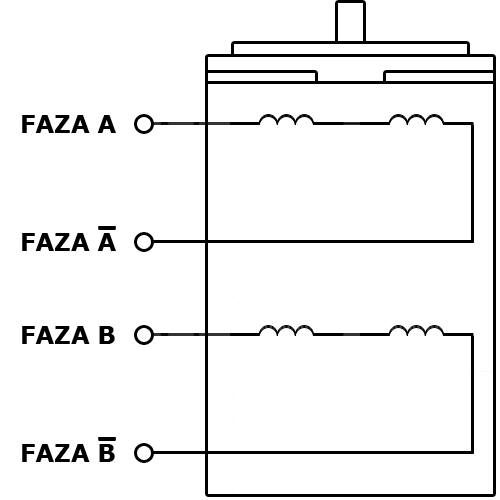
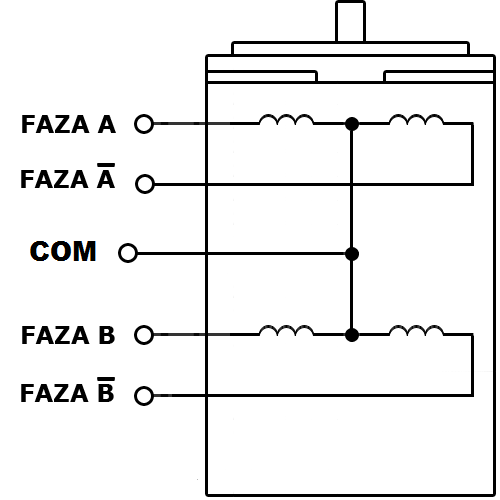
Silniki krokowe najczęściej posiadają 4, 5, 6 lub też 8 wyprowadzeń przewodów, przez co posiadają najczęściej cztery uzwojenia. Zaciski do podłączenia silników, zazwyczaj oznaczone są jako: A, A/ dla pierwszej fazy (cewki), oraz B, B/ dla drugiej fazy. Jeżeli nie posiadamy dokumentacji silnika, możemy w bardzo prosty sposób ustalić, które przewody tworzą parę, przy czym ich oporność wskazuje mniej więcej moc silnika. Innym sposobem ustalenia faz silnika w przypadku silników z magnesem trwałym oraz hybrydowych, jest zwarcie wyprowadzeń silnika. Jeżeli żadne wyprowadzenia nie są ze sobą połączone, wówczas oś silnika obraca się gładko. Jeżeli zewrzemy wyprowadzenia jednej z faz, wówczas podczas obracania wału silnika powinien być wyczuwalny moment oporowy. Poniższy schemat przedstawia opis wyprowadzeń silnika czteroprzewodowego.
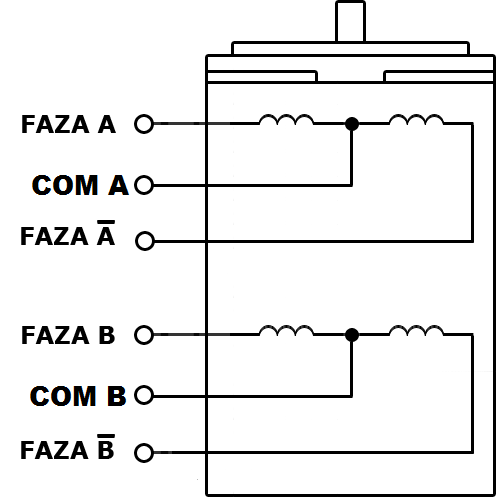
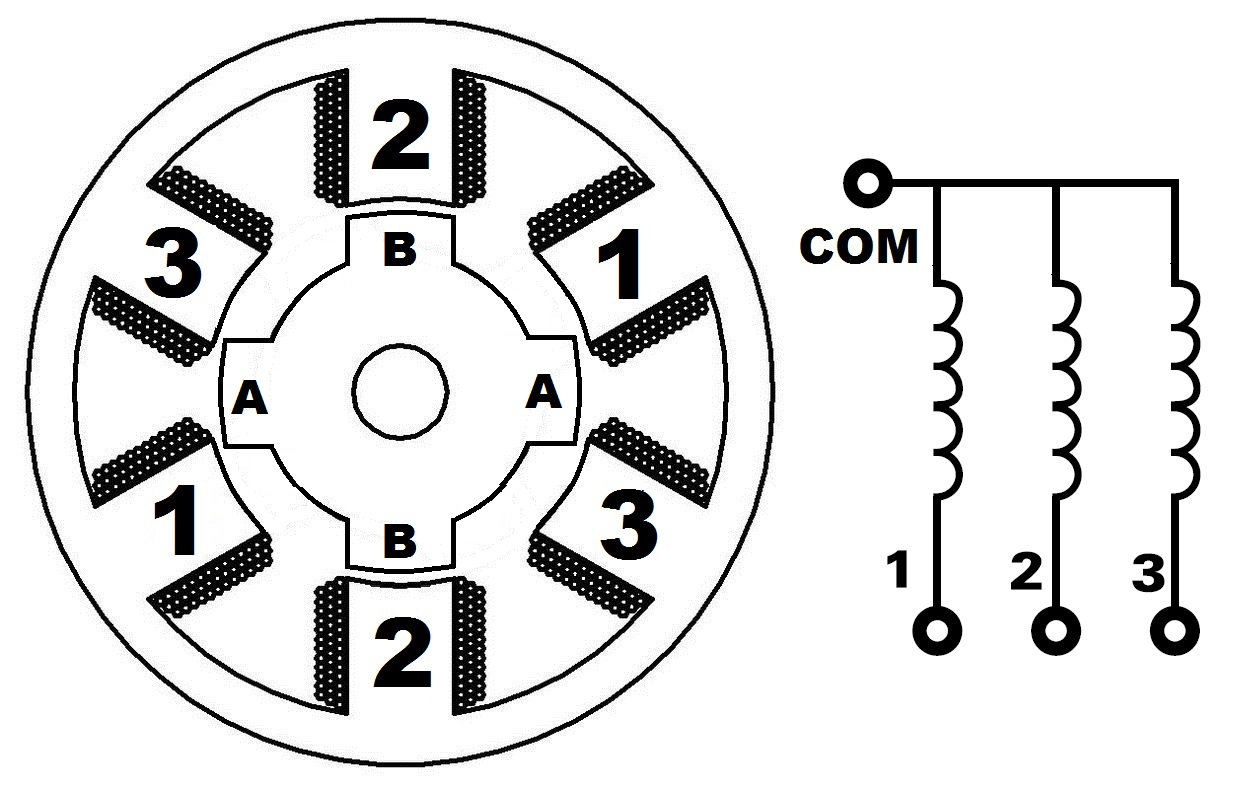
Bardzo często silnik ma sześć wyprowadzeń, a układ połączeń wygląda jak na schemacie poniżej. Identyfikacja końcówek za pomocą omomierza jest bardzo prosta. Jeżeli chodzi o silniki 6-przewodowe, to różnią się one od silników, 4-przewodowych tym, że mają wyprowadzone dodatkowe odczepy uzwojeń, które to dzielą je na dwie połowy. Tego typu budowa uzwojeń wykorzystywana jest przy sterowaniu unipolarnym, ale nie dyskwalifikuje silnika z 6 wyprowadzeniami do sterowania bipolarnego.
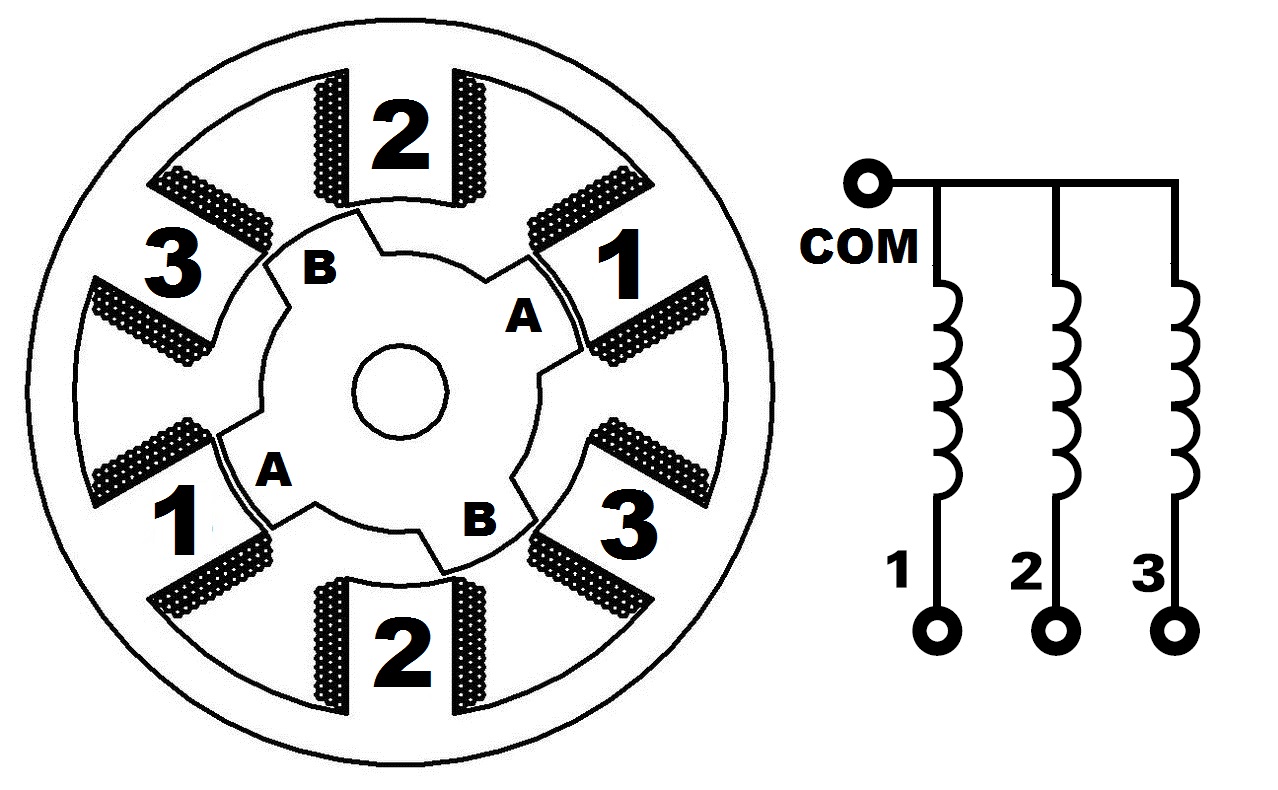
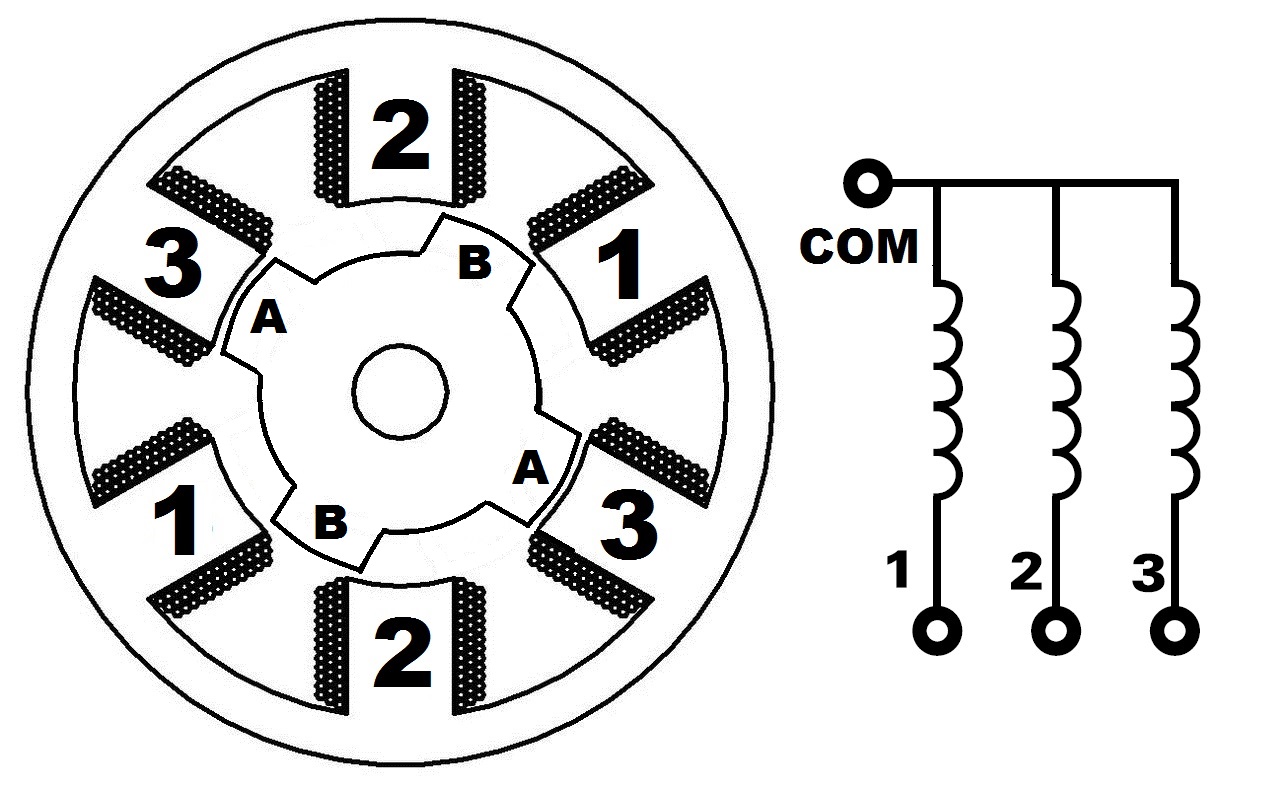
Zdarza się spotkać silnik z pięcioma wyprowadzeniami- taki silnik nazywany jest unipolarny i tylko w ten sposób może być sterowany. Identyfikacja wspólnego przewodu COM jest bardzo prosta. Sprawa komplikuje się przy identyfikacji pozostałych przewodów. Identyfikacji można dokonać np. przez podłączenie silnika do sterownika oraz zmieniając końcówki wyprowadzenia. Jeżeli silnik jest nie właściwie podłączony nie będzie obracał się, albo zacznie się „kołysać”. Schemat poniżej przedstawia opis wyprowadzeń silnika pięcioprzewodowego.
Sprawdź cenę silników krokowych w sklepie EBMIA.pl
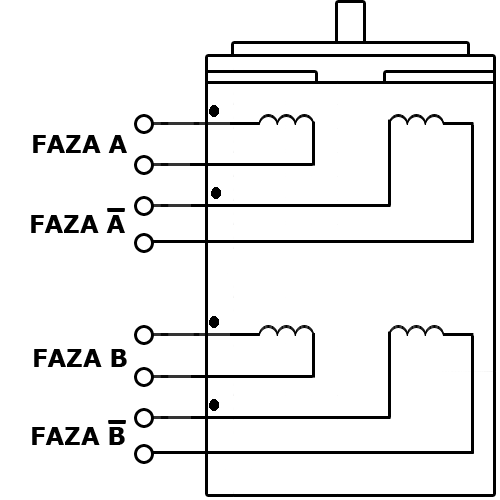
Zdarza się też, że silnik ma osiem wyprowadzeń, co pozwala w wymyślny sposób nim sterować: bipolarnie, unipolarnie, połączenie pół cewki, połączenie całej cewki. W tego typu silnikach uzwojenia poszczególnych faz zostały podzielone na dwie odrębne części.Identyfikacja przewodów w takim silniku trochę komplikuje sprawę z tego powodu, że nie tylko musimy zdefiniować pary przewodów, przy pomocy np. omomierza, ale również rozpoznać początki i końce uzwojeń. W tym przypadku bardzo pomocna może się okazać karta katalogowa danego silnika na którym, zazwyczaj jest umieszczony schemat wyprowadzeń silnika z kolorami przewodów oraz kropkami zaznaczone są początki uzwojeń. Schemat poniżej przedstawia silnik z ośmioma wyprowadzeniami.
Aby zrozumieć zasadę działania silników krokowych, opiszęteraz trzy rodzaje silników. Pierwszym będzie silnik reluktancyjny, zwany częściej silnikiem o zmiennej reluktancji, którego skrótowo oznacza się VR – od ang. Variable Reluctance.
Zasada działania silnika krokowego
Każdy z nas na pewno zna zasadę działania elektromagnesu- kiedy przyłożymy do niego napięcie powstaje pole elektromagnetyczne. Takie elektromagnesy możemy spotkać np. w przekaźnikach elektrycznych. Kiedy podamy napięcie na cewkę przekaźnika, zostaje przyciągnięta kotwiczka od styków przełącznika, mówiąc inaczej po przyłożeniu napięcia na cewkę przekaźnika elektromagnes dąży do zmniejszenia oporu magnetycznego po przez zamknięcie obwodu magnetycznego, przyciągając kotwiczkę przekaźnika. A opór magnetyczny to reluktancja. Na podobnej zasadzie działają silniki reluktancyjne, które to tak jak przekaźnik po przez zamknięcie pola magnetycznego dążą do zmniejszenia oporu magnetycznego (reluktancji) wywołując przy tym ruch wirnika. Wykorzystuje się tu tzw. moment reluktancyjny.

Niestety silnik przedstawiony na rysunku wyżej nie będzie wykonywał ruchu ciągłego, z powodu jednej tylko cewki. Poniżej przedstawiono schematyczną budowę silnika z trzema cewkami, które podzielono na dwie części i nawinięto naprzeciwko siebie, co daje nam trzy pary biegunów w silniku.
Rysunek wyżej pokazuje położenie wirnika przy zasilaniu uzwojenia 1, które to bieguny przyciągną do siebie zęby A wirnika (rotora). Natomiast w następnym takcie zostanie wyłączone uzwojenie 1 z zasilania,a zostanie załączone uzwojenie 3, które to przyciągną zęby wirnika B. Silnik wykona obrót w prawo (krok) o 30 stopni. Trzeba tu zauważyć, że silnik dąży do zmniejszenia oporu magnetycznego i przyciągnął najbliżej się znajdujące zęby B, a nie A jak w poprzednim takcie. Położenie rotora wtedy będzie wyglądało tak:
W następnym takcie zostanie wyłączone zasilanie z uzwojenia 2. Natomiast zostanie załączone zasilanie dla uzwojenia 3, bieguny przyciągną do siebie najbliżej znajdujące się zęby rotora A. Silnik wykona kolejny krok o 30 stopni w prawo. Położenie wirnika (rotora) będzie wyglądało tak:
W kolejnym takcie zostanie wyłączone zasilanie z uzwojenia 3, a włączone z powrotem dla uzwojenia 1, silnik wykona kolejny krok o 30 stopni. Położenie rotora wygląda identycznie jak przy takcie pierwszym. Każdy kolejny impuls dla sterownika silnika, powoduje skok o 30 stopni i następny skok rotora. Nasz przykładowy silnik ma 30 stopni, co daje 12 kroków na obrót silnika. W rzeczywistości silniki reulktancyjne mają dużo większą liczbę biegunów oraz zębów wirnika. Dzięki temu mają mniejszy krok co rozszerza liczbę kroków na obrót silnika. Jednak zasada działania silnika krokowego jest identyczna. Do zasilania silnika potrzebna jest sekwencja impulsów, co umożliwia nam tzw. sterownik silnika krokowego. Diagram poniżej prezentuje nam przebieg tych impulsów:

Warto też wspomnieć, że silniki reluktancyjne VR nie posiadają magnesów trwałych, dzięki czemu dla nie zasilonego silnika, wirnik obraca się swobodnie w przeciwieństwie do innych silników krokowych np. z magnesami stałymi gdzie wyczuwalny jest skok. Rzadko można już spotkać silniki rekuktancycje, raczej się je wycofuje ze sprzedaży z powodu słabych parametrów. Silniki relutkacyjne zostały wyparte przez inne silniki krokowe.
Sprawdź cenę silników krokowych w sklepie EBMIA.pl
Zasada działania – Silniki krokowe z magnesem stałym
Następne silniki, które zaprezentuję są to silniki z magnesem stałym (trwałym), noszą one skrót PM – od ang. Parmanet Magnet.

Zasada działania silnika z magnesem stałym opiera się na wzajemnym oddziaływaniu biegunów magnesów(interakcji biegunów magnetycznych). Każdy z magnesów posiada dwa bieguny N – ang. north, północny oraz S – ang. soth, południowy. Bieguny różnoimienne N-S przyciągają się, natomiast jednoimienne S-S N-N odpychają się, zjawisko interakcji magnetycznej prezentuje rysunek poniżej:
Jeżeli zastąpimy jeden z magnesów elektromagnesem, zjawisko będzie identyczne.

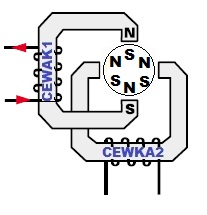
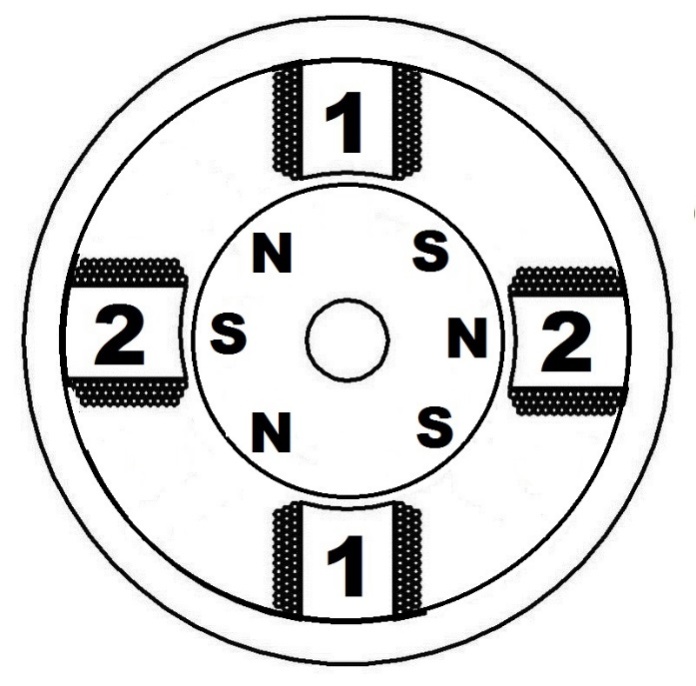
Silnik z magnesami stałymi mógłby mieć dwie cewki (elektromagnesy), które by tworzyły cztery zmienne bieguny, a rotor (wirnik) silnika byłby namagnesowany promieniowo. Zmiana biegunów polegałaby na zmianie kierunku przepływu prądu w cewkach, co prezentuje rysunek poniżej. Wirnik w takim silniku przy zmianie kolejnego taktu obróciłby się o 90 stopni, co jest bardzo nie korzystne przy pozycjonowaniu. Dokładność tego silnika byłaby bardzo mała. W rzeczywistości silniki z magnesami stałymi mają więcej biegunów wirnika. Rotor takich silników nie ma zębów, ale składa się tak jakby z kilku magnesów naprzemiennie namagnesowanych promieniowo, co znacznie zwiększa precyzję takiego silnika. Zazwyczaj silniki krokowe z magnesami stałymi mają podział od 7,5 stopnia do 15 stopni co daje nam 24-48 kroków na obrót, czyli 6-24 par biegunów wirnika. . Namagnesowane bieguny rotora wpływają na zwiększenie indukcji magnetycznej, dlatego silniki z magnesem trwałym w porównaniu z silnikami o zmiennej reluktancji mają lepszą charakterystykę tzn. posiadają więcej siły. Poniższy rysunek przedstawia silnik z wirnikiem,który ma trzy pary biegunów wirnika oraz dwie pary biegunów stojana.
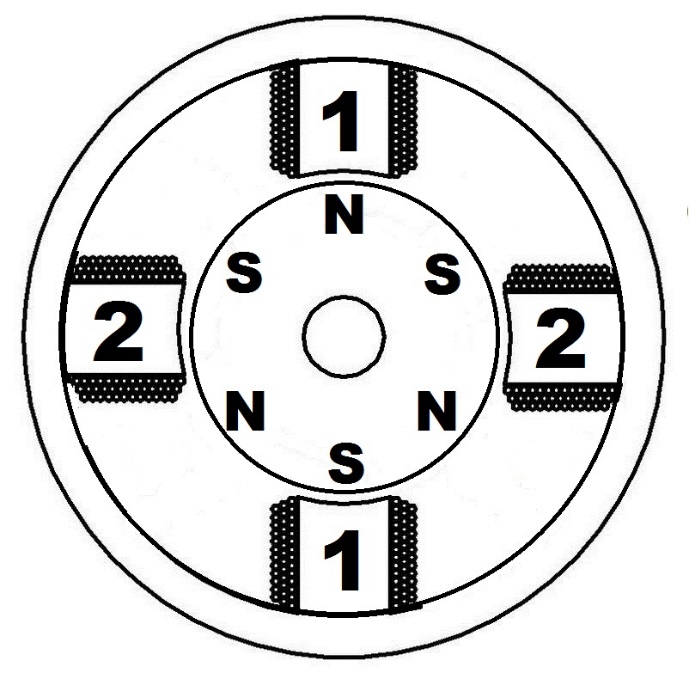 |  |
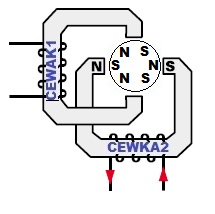
Jeżeli przyłożymy napięcie do cewki 1, (powstanie jak wyżej wspomniany elektromagnes) silnik będzie zahamowany tzn. będzie trzymał swój moment (Nm), po przez przyciągnięcie do siebie biegunów wirnika. Mamy tutaj zjawisko interakcji biegunów magnetycznycznych zgodnie z rysunkiem powyżej. Natomiast jeżeli wyłączymy napięcie z cewki 1, a załączymy dla cewki 2, silnik obróci się o 30 stopni, wykona jeden krok. Rotor w takim silniku będzie wyglądał tak:
 |  |
W takcie trzecim zmienią się bieguny wirnika tzn. na pierwszym zdjęciu zasilając cewkę 1 u góry wirnika mamy N na dole S, teraz będzie kolejność odwrotna w góry będziemy mieli S na dole N.
 |  |
Aby bieguny się przyciągnęły, musimy w takim wypadku zmienić biegunowość cewki 1 (elektromagnesów stojana), dokonamy tego po przez zmianę kierunku przepływu prądu przez cewkę 1 tzn. odwrócimy „polaryzację” zasilania cewki 1. Silnik wykona kolejny krok o 30 stopni. Natomiast w kolejnym takcie wyłączymy z zasilania cewkę 1, zmieniając kierunek prądu dla cewki 2 przyciągniemy do siebie następne bieguny wirnika, silnik wykona kolejny krok o 30 stopni.
 |  |
W następnym takcie wracamy do rysunku pierwszego silnika czyli wyłączamy cewkę 2 z zasilania, zasilamy cewkę 1, o odpowiednim kierunku przepływu prądu. Wykonamy krok o kolejne 30 stopni.
Silnik wykonał cztery takty, czyli obrócił się o 120 stopni, 12 kroków (taktów) na obrót. Mamy tutaj do czynienia z wirującym polem magnetycznym, które nie zbiera ze sobą wirnika, niemniej powoduje przeskoki między jego ustalonymi położeniami (wyczuwalne kiedy obrócimy wałkiem, a kierunki wirowania pola i wirnika są przeciwne.
Silnik krokowy hybrydowy – budowa i zasada działania
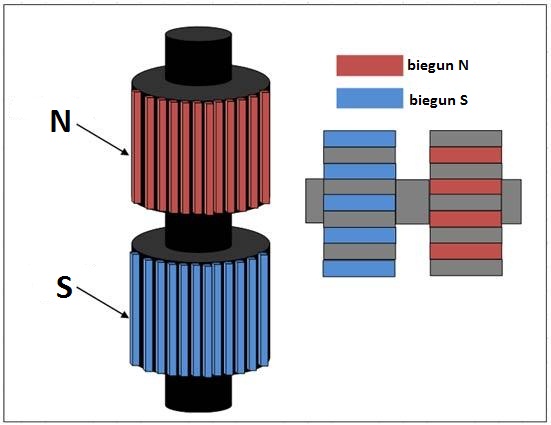
Następnym silnikiem, którego weźmiemy do analizy będzie silnik hybrydowy, oznaczany symbolem HB – ang. Hybrtid. Zdjęcie silnika hybrydowego jest zaprezentowane na początku artykułu silnika FL57STH56-2804A. Silniki hybrydowe są najczęściej wykorzystywane w przemyśle, z tego powodu,że łączą ze sobą obydwie technologie silników krokowych o których mowa wyżej, dzięki czemu mają lepszą charakterystykę, lepsze osiągi. Rozdzielczość takiego silnika jest znacznie większa, zazwyczaj kąt obrotu mieści się w zakresie od 0,9 stopnie do 3,6 stopnia co daje 100-400 kroków na obrót. Wirnik (rotor) takiego silnika jest zbudowany z magnesów trwałych, ale w przeciwieństwie do silników PW magnesy nie są umieszczone promieniowo, ale jest namagnesowany osiowo. Zazwyczaj wirnik takiego silnika składa się z dwóch pierścieni namagnesowanych różnoimiennie, nałożonych na oś silnika. Co prezentuje rysunek poniżej.

Każdy z pierścieni posiada małe kanaliki (żłobki) co daje ząbki na wirniku, czym więcej jest żłobków , tym rozdzielczość silnika jest większa (mniejszy kąt skosu wirnika, więcej kroków), jak wspomniałem wcześniej, silniki hybrydowe posiadają 100-400 kroków na obrót. Mały skok jest tutaj zaletą, można go bardziej precyzyjnie pozycjonować. Zęby rotora zapewniają lepszą drogę przepływowi magnetycznemu co polepsza charakterystykę silnika, moment spoczynkowy i dynamiczny jest większy w porównaniu z silnikami PM oraz VR. Na dodatek każdy z pierścieni wirnika jest przesunięty względem siebie o pół ząbka. Prezentuje to rysunek poniżej:
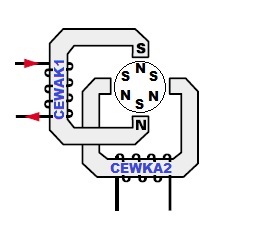
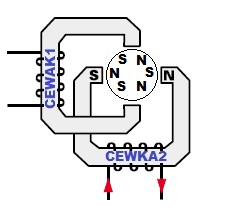
Stojan takiego silnika zazwyczaj ma dwa uzwojenia i osiem biegunów, z tym że cztery bieguny współpracują z jednym uzwojeniem tzn. zasilając jedną z cewek silnika pojawiają się na stojanie dwa różnoimienne bieguny, ułożone jednoimiennie promieniowo. Na rysunku poniżej w pierwszym takcie została zasilona cewka A. W drugim takcie została wyłączona z zasilania cewka A, a natomiast zasilona została cewka B. W trzecim takcie została wyłączona cewka B, a została zasilona ponownie cewka A, z tym że został odwrócony kierunek przepływu prądu w cewce, z tego powodu cewki stojana zmieniły swoją biegunowość. W czwartym takcie została wyłączona z zasilania cewka A, natomiast została zasilona cewka B, również z odwróconym kierunkiem prądu. Spowodowało to zmianę biegunowości stojana. Sterowanie jest podobne jak przy silniku PM, opisanym wyżej. Zmiana kierunku podawania prądu na cewkę, powoduje odwrócenie biegunowości elektromagnesów stojana.

Stojan również posiada żłobki, z tym że ząbki stojana nie są przesunięte, ale są równe na całej długości wirnika.
Zasada działania silnika hybrydowego opiera się na interakcji magnetycznej . Magnes trwały umieszczony na wirniku wytwarza jedno biegunowy strumień magnetyczny, który zamyka się w obwodzie magnetycznym: stojan – szczelina powietrzna – wirnik. Po zasileniu uzwojenia stojana, wzbudzony strumień magnetyczny pod jednym biegunem stojana dodaje się do strumienia magnesów trwałych, pod drugim zaś odejmuje się. Wirnik zostaje wprowadzony w ruch tak by osie zębów stojana i wirnika pokryły się.
Można powiedzieć w uproszczeniu, że jeżeli ząbki jednego „pierścienia” rotora zgadzają się z ząbkami stojana, wtedy ząbki drugiego pierścienia rotora na pewno nie zgadzają się z ząbkami stojana, tylko ze żłobkami dla zasilonej cewki oraz zazębiają się o pół ząbka dla nie zasilonej cewki. Tak jakby „czekają” na wyłączenie cewki ze zgadzającymi się ząbkami i zasilenie cewki, na które zazębia się pół ząbka aby wykonać ruch, przesuwając się z pół ząbka stojana na cały. Mamy tutaj do czynienia z interakcją pola magnetycznego. Rysunek poniżej prezentuje ułożenie ząbków w poszczególnych taktach pracy silnika.

Zasada działania silnika hybrydowego jest podobna do silnika VR. Silnik hybrydowy przypomina silnik VR o bardzo dużej liczbie biegunów i zębów wirnika. Silniki hybrydowe są najczęściej wykorzystywany w przemyśle dzięki dużo lepszym osiągom, w przeciwieństwie do silników PM, chociaż są droższe.
Przestawiłem pokrótce sposób działania silników krokowych. Są to piękne urządzenia, których zasada działania wbrew pozorom nie jest trudna. W następnym artykule przedstawię sposoby sterowania silników krokowych.
Sprawdź cenę silników krokowych w sklepie EBMIA.pl
Dziękuję! Teraz rozumiem, dlaczego przebiegi na uzwojeniach oglądane oscyloskopem mają impulsy dodatnie i ujemne naprzemiennie z przerwą.
Pozdrowienia!
Te silniki nie są zasilane impulsami! Zasilane są prądem stałym, a sterowane są impulsami.
Stosuję metody mniej wyrafinowane , bez elektroniki .
Niezawodne tanie skuteczne , proste od 30 lat.
Gdy mogłem zdobyć , silnik krokowy.